При использовании телеуправляемых аппаратов обезвреживание бомб становится менее опасным делом. Оператор находится на безопасном расстоянии от взрывного устройства — обычно почти за 100 м. Телеуправляемый аппарат, перемещающийся на колесах или гусеницах, направляют к тому месту, где находится взрывное устройство. Как правило, он питается электроэнергией, поступающей либо от внешнего источника, либо от бортовых аккумуляторов. Приблизившись к месту нахождения бомбы, аппарат передает через телекамеры изображения бомбы оператору, который дает роботу команду снять часть взрывного устройства с помощью манипуляторов или удалить предметы, затрудняющие доступ к бомбе. После того как в поле зрения появляется детонатор бомбы, оператор переводит робот в положение, из которого он может уничтожить взрывной механизм бомбы, например выстрелив в него или предприняв другие аналогичные действия.
В области производства телеуправляемых аппаратов, предназначенных для обезвреживания бомб, лидирует лондонская фирма «Морфакс», которая с 1975 г. выпускает телеуправляемое устройство «Уилбарроу». Это устройство разработано совместно Управлением экспериментальных военных транспортных средств, исследовательского центра министерства обороны (Чобем, графство Суррей) и службой материально-технического снабжения британской армии. Как постоянный поставщик министерства обороны фирма «Морфакс» получила лицензию на право производства аппарата «Уилбарроу». Она продала около 500 подобных устройств, в том числе 100 роботов для британской армии и лондонской полиции. Остальные устройства проданы армейским и полицейским службам сорока стран.
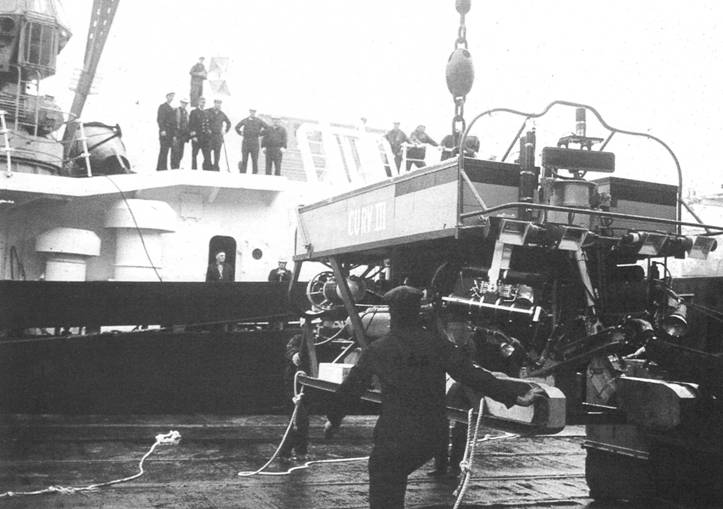
Аппарат КУРВ III (управляемое по кабелю устройство для подводного ремонта) разработан Центром подводных работ ВМС США (Сан-Диего). На фотографии показан подъем аппарата на борт судна, с которого ведется ремонт поврежденных подводных кабелей. Аппарат подготовлен для выполнения работ по спасению подводной лодки «Пискес III», потерпевшей аварию в августе 1973 г. на глубине 435 м.

Работы по спасению подводной лодки «Пискес III» идут полным ходом — аппарат КУРВ III готовится закрепить буксировочный трос.

Аппарат КУРВ III на борту платформы, предназначенной для его подъема и спуска.

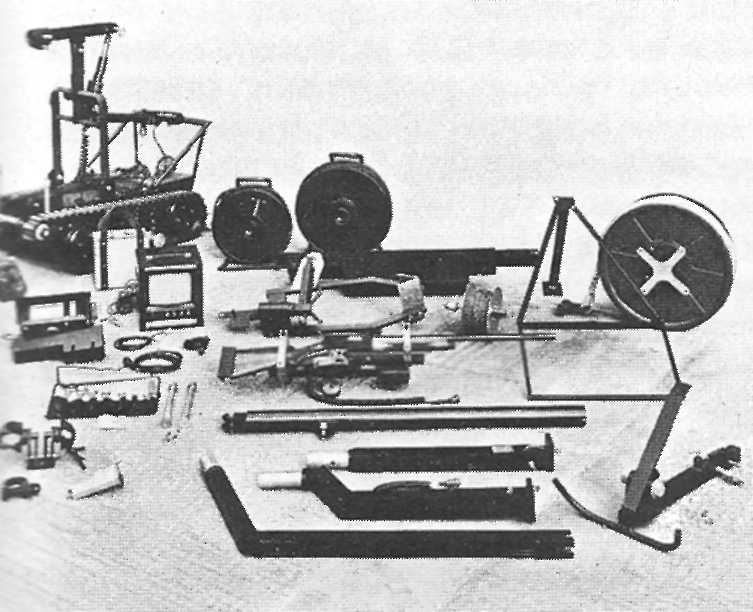
Подвижный аппарат «Уилбарроу» для обезвреживания бомб, выпускаемый фирмой «Морфакс». В комплект оборудования (внизу) этого устройства входят монитор системы замкнутого телевидения, дробовое ружье для вывода из строя детонатора, разнообразные грузовые стрелы и захваты, катушки с буксировочными канатами и тросами, а также пульт, с помощью которого осуществляется управление аппаратом.
Телеуправляемый аппарат «Уилбарроу» не может действовать автономно: каждым его действием управляет человек. Фирма «Морфакс» считает, что этот робот не нуждается в компьютерном управлении, ибо каждый случай обезвреживания бомбы по-своему специфичен.
Телеуправляемый аппарат «Уилбарроу» перемещается с помощью гусениц, обладая способностью преодолевать ступеньки и разворачиваться в узких местах. Его стоимость (включая комплект стандартного оборудования, в который входят манипуляторы) 23 тыс. долл. Другие фирмы, работающие в этой области, выпускают устройства, в основном аналогичные аппарату «Уилбарроу», однако некоторые из них перемещаются на колесах и получают электроэнергию не от бортовых аккумуляторов, а по кабелю. Конкурентами аппарата «Уилбарроу» являются робот Хантер (охотник) фирмы «Сас груп» (Би-консфилд) и устройство Хадриан фирмы «Монитор энджинирс» (Уол-сенд). Во время проведения Олимпийских игр 1984 г. в Лос-Анджелесе телеуправляемые аппараты Хадриан и Хантер находились в резерве на случай обнаружения бомб.
Заслуживают упоминания еще два робота — Скаут фирмы «Вейл секьюри-ти» (Уонтедж) и Ро-Вех фирмы «Аналитикал инструменте» (Кембридж). Оба робота по размерам и массе меньше аппарата «Уилбарроу» и более удобны для транспортировки, так как помещаются в багажнике автомобиля. Робот Хобо (бродяга), предлагаемый фирмой «Кентри» (графство Корк, Ирландия), передвигается на колесах (подобно Хадриану и Хантеру).
Калифорнийская фирма «Оде-тикс» — один из лидеров среди компаний, работающих над созданием полностью автономных военных роботов. Выпускаемые ею роботы пригодны для выполнения различных операций: обезвреживания бомб, несения караульной службы, минирования и разминирования местности, а также различных действий на поле боя. При этом руководство фирмы «Одетикс» полагает, что роботы различного назначения могут быть созданы на основе базовой конструкции робота Одекс-1, разработка которого обошлась фирме в 1 млн. долл. Робот Одекс-1, ростом почти с человека, может шагать по лестнице со ступенями высотой до 1 м и с помощью манипулятора поднимать груз массой 1 т. Он питается от батареи напряжением 24 В и управляется семью компьютерами — по одному на каждую из шести ног шарнирного типа, а еще один компьютер управляет ходьбой, координируя действия конечностей робота. Робот Одекс-1 может «шагать» со скоростью идущего человека, «приседать», когда нужно пройти через низкие проходы, а также на ходу менять направление движения. По своим возможностям он стоит между телеуправляемыми аппаратами и настоящими роботами. Хотя Одекс-1 обладает некоторой автономностью, им по радио управляет оператор. Фирма «Одетикс» называет этот робот «функционоидом».
Общие направления разработки аппаратов, предназначенных для использования в военных операциях, были изложены на конференции в 1981 г. Дэниелом Леонардом из министерства ВМС США: «Ожесточенный характер военных конфликтов естественно наводит на мысль о привлечении некоего искусственного создания для выполнения опасной работы, что в свою очередь породило идею использования на поле боя дистанционно управляемых устройств — телеуправляемых манипуляторов и роботов, которые можно назвать «дистанционно дислоцируемыми системами оружия» (ДДСО). ДДСО играют совсем иную роль, чем промышленные роботы, и поэтому к их проектированию требуется другой подход. Промышленные роботы, как правило, предназначены для эксплуатации в сравнительно благоприятной среде и служат для выполнения операций, которые либо требуют силы или высокой точности, либо весьма утомительны или однообразны... ДДСО следует создавать с учетом того, что они будут уничтожены в бою, т. е. на этапе проектирования во внимание прежде всего нужно принимать их стоимость. Эти роботы должны быть прочными, но не обязательно сверхпрочными».