Для выполнения операций, более сложных, нежели замена модулей, потребуются усовершенствованные рабочие органы. В ближайшем будущем возможно создание системы с двумя рабочими органами: один — для захвата деталей, другой — для многократной замены инструмента; последнее необходимо в тех случаях, когда манипулятору перед снятием старого модуля придется размыкать соединители и отсоединять провода, а затем, после установки нового, восстанавливать эти соединения. Такие рабочие органы должны отличаться малыми размерами и высокой точностью выполнения операций.
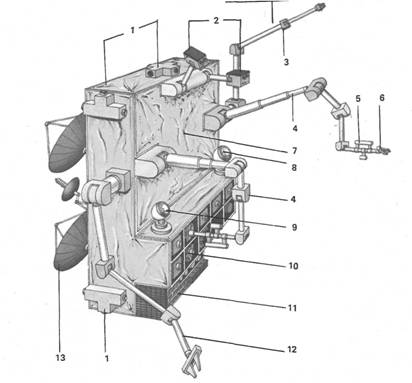
Дистанционно пилотируемый обслуживающий модуль (ДПОМ): 1 — маневровые двигатели; 2 — телекамеры; 3 — стыковочный манипулятор; 4 — рабочий манипулятор; 5 — телекамера; 6 — схват; 7 — теплозащита; 8, 9 — фара; 10 — полка с рабочими органами; 11 —стеллаж с запасными частями; 12 — стыковочный манипулятор; 13 — антенны систем связи и навигации.
Этот роботизированный космический аппарат, разработанный учеными из Массачусетского технологического института совместно, со специалистами НАСА, предназначен для технического обслуживания космических аппаратов, причем такие операции в космосе он способен выполнять не хуже человека. В основу ДПОМ положен принцип «дистанционного присутствия», в соответствии с которым оператор может управлять с Земли перемещениями аппарата в космосе так, как если бы он находился на его борту. Два манипулятора захватывают на орбите спутник, вышедший из строя, а два других выполняют ремонтные работы.
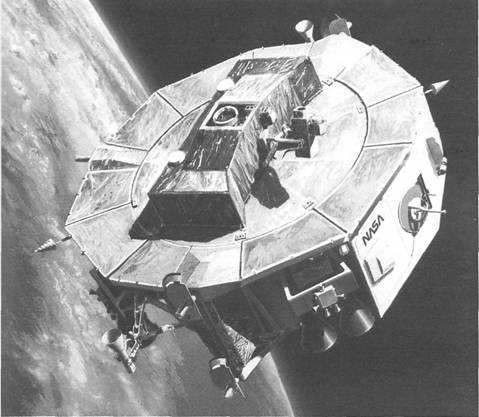
При выводе спутников на орбиту (или снятия их с орбиты), которой «Шаттл» не может достичь, МОА выходит из грузового отсека корабля в космическое пространство.
Среди наиболее сложных задач можно назвать сборку строительных конструкций: подобные работы включают множество незапланированных операций, которые приходится выполнять поочередно, но не в строгом соответствии с той или иной предварительной программой. В этом нетрудно убедиться, понаблюдав за строительством здания.
Коллектив специалистов, работающих над программой АРАМИС, подготовил общий проект дистанционно пилотируемого обслуживающего модуля (ДПОМ). В первом приближении этот модуль напоминает маневрирующий пилотируемый аппарат (МПА), выведенный НАСА на орбиту в 1984 г. Этот модуль будет оснащен четырьмя манипуляторами: два из них, предназначенные для работы с объектами, размещаются на лицевой стороне модуля, а два других, менее мощных (они служат для причаливания к целевому объекту), — по бокам. Ниже манипуляторов смонтирована полка со специализированными рабочими органами, а под ней — стеллаж с запасными частями. Телекамеры установлены по центру модуля и над плечевыми суставами манипуляторов; кроме того, предусмотрено по одной камере непосредственно на каждом манипуляторе. Для доставки такого обслуживающего аппарата на рабочее место придется использовать более мощный МОА, который сможет «ожидать» неподалеку, пока ДПОМ не закончит работу. Этот МОА мог бы также осуществлять ретрансляцию сигналов с ДПОМ на Землю, перезаряжать его аккумуляторы и служить хранилищем более крупных компонентов, которые в обычном случае невозможно разместить в стеллаже на борту ДПОМ.
В такого рода системе предлагается использовать также бинокулярный нашлемный индикатор, с которого передавались бы команды на перемещение телекамеры в соответствии с движениями головы оператора. Это позволило бы оператору наблюдать за происходящим в том или ином месте, просто посмотрев туда, а не манипулируя переключателями, управляющими телекамерой. Нашлемный индикатор можно было бы изготовить на основе светодиодов и волоконно-оптических кабелей (что уменьшило бы массу устройства). А при наличии устройств распознавания речи оператор имел бы возможность «приказывать» системе менять масштаб изображения.
Два манипулятора с семью степенями свободы — предпочтительнее антропоморфной конфигурации — должны обладать почти человеческой ловкостью движений и способностью охватывать предметы небольших размеров. Для прочного сцепления с объектом космический обслуживающий аппарат необходимо снабдить стыковочным приспособлением или двумя швартовочными захватами. Если последние лишены собственного привода, то их должны перемещать рабочие манипуляторы, а имеющиеся в захватах фиксирующие приспособления должны удерживать космический аппарат в нужном положении. Можно применить манипуляторы с передачей усилий при помощи тросиков; такие манипуляторы обладают меньшей массой, но большей силой, поскольку приводные двигатели в данном случае устанавливаются вблизи плеча. Это не только устранит инерционные явления (включая люфты и ошибки позиционирования), но и уменьшит массу всей системы, так как число двигателей, которые через передаточный механизм приводят в движение несколько суставов, будет невелико.
Один из первых вариантов такого манипулятора будет, по всей вероятности, копировать движения человеческой руки, которая в совокупности с соответствующими органами управления как бы образует аналогичный аппарат, но уже на Земле. Система должна иметь обратную связь по усилию, благодаря которой оператор может ощущать себя как бы на месте выполнения работ. Однако выигрыш, обусловленный использованием обратной связи по усилию, заметно снижается из-за наличия временной задержки (хотя сведение меняющихся задержек к постоянному запаздыванию на 2—3 с даст оператору некую константу, на которую он может опираться в своих действиях). «Чем сложнее задание, тем в большей степени обратная связь по усилию помогает работе оператора... Одним из перспективных вариантов является использование копирующего манипулятора (задающей руки либо «экзоскелета») с измерением прикладываемого усилия и передачей космическому аппарату команд на приложение аналогичного усилия». Здесь также потребуется безотказная работа системы управления, которая прекращает операции, когда прерывается связь, или препятствует копированию тех действий оператора, которые выходят за рамки, установленные заданием (иначе, что произойдет, если оператор, например, чихнет?). Поскольку руки оператора заняты, возникает потребность в системах речевого управления, обеспечивающего дополнительный контроль за телекамерами и передвижениями устройства.

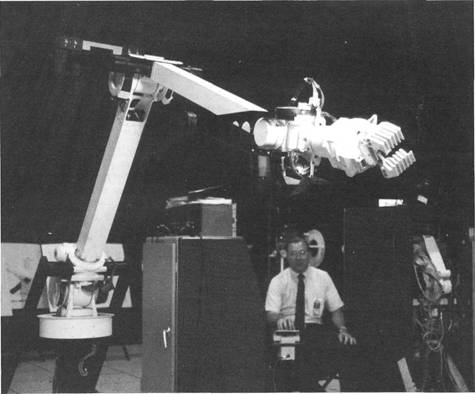
В ходе эксперимента выяснилось, что манипулятор КООС может заменять отказавшие электронные блоки на борту вышедшего из строя КА.
Следующим шагом в усовершенствовании космических манипуляторов должно стать овладение осязанием. Существует заметное различие между восприятием усилия и осязанием. Первое эквивалентно толканию ящика по полу или поднятию тяжестей; поэтому его несложно обеспечить установкой двигателей, создающих соответствующее сопротивление руке оператора. Осязание же идентично выявлению разницы в фактуре тканей, изготовленных из двух материалов с одинаковой удельной массой, и для его реализации требуются более тонкие приемы.

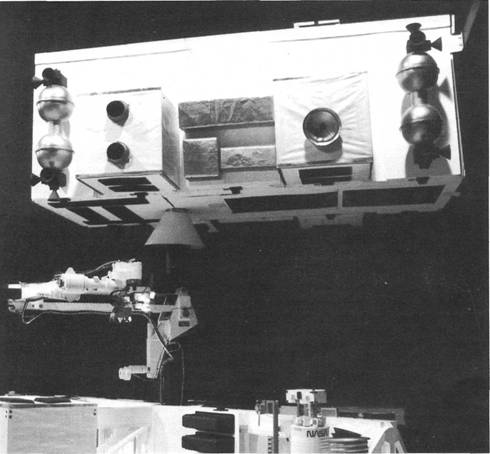
Модель МОА плавает над поверхностью «плоской платформы» имитатора, установленного в Центре космических полетов им. Маршалла.
«С точки зрения эргономики чем более «незаметна» система для оператора, тем удобнее ему с ней работать... Механик на производстве редко задумывается над тем, куда и как переместить свою руку: управление рукой совершается как бы само по себе. Если бы ему пришлось намечать и обдумывать каждое свое движение, то работа затормозилась бы. Или представим себе бегуна. Если он попытается управлять своими ногами, обдумывая кинематику движений, то, вероятно, не сможет даже ходить — не то что бегать».
Космический аппарат такого усовершенствованного типа можно было бы использовать и на других планетах. Построенный в виде вездехода на ногах или колесах и управляемый на основе тех же принципов, что и земные роботы, он мог бы странствовать по поверхности Марса или других планет под управлением с Земли. Своими манипуляторами вездеход мог бы собирать и обрабатывать в собственной химической лаборатории образцы, а также устанавливать (и даже ремонтировать уже размещенные на планете) системы сбора информации, которые будут доставляться в «готовом» виде.
Фирма «Мартин Мариетта» разработала МЭП (манипулятор для экспериментальных полетов), который может выполнять в космосе ряд весьма сложных операций, например отсоединять провода или открывать дверцы.
Макет КООС в Центре им. Маршалла. Вверху находится модель спутника, на котором отрабатываются ремонтные операции; в центре виден манипулятор КООС, а под ним — сам модуль КООС.
«Техника и методика управления — вот ключ к дистанционному присутствию, — писали исследователи, работавшие над программой АРАМИС. — Правильно ориентированная система управления позволит скомпенсировать многие другие недостатки, тогда как неудачная сведет на нет работу всего остального оборудования независимо от его качества».
Начиная с 1995 г. в конструкции космических аппаратов дистанционного присутствия планируется внедрять новейшие средства искусственного интеллекта. За созданием исходного образца аппарата последует ряд усовершенствований с целью расширения его возможностей, направленных на повышение автономности и «ответственности» аппарата. Использование более «разумных» аппаратов позволило бы в значительной мере скомпенсировать неудобства, обусловленные запаздыванием сигналов в системе связи, тем самым избавив оператора на Земле от утомительных процедур, подобно тому как аналогичные устройства должны помочь рабочим на промышленных предприятиях. Искусственный интеллект обеспечит также возможность адаптивного управления, которое позволит роботу приспосабливаться к меняющимся условиям и правильно реагировать на некоторые несоответствия между поставленной задачей и предполагаемыми результатами. Если, например, не откручивается болт, то робот может увеличивать приложенное к нему усилие до тех пор, пока болт не отвернется или не будет достигнут предел безопасности воздействия. После этого робот может попытаться выяснить причины затруднений или обратиться «за помощью» к оператору-человеку.
При полном эффекте дистанционного присутствия «оператор ощущает себя как бы на месте работ, действуя свободно на основании опыта, навыков, технических знаний и способности принимать решения, присущих только человеку. Управление такой «разумной» системой не потребует какой-либо специальной подготовки, поскольку она будет функционировать подобно человеку. Конструкция манипуляторов может быть и не антропоморфной, но вся система сможет воспринимать и обрабатывать входную информацию в форме, пригодной для восприятия человеком».
Проблема зрения космических роботов, как, впрочем, и земных, довольно сложна. На ближайшем этапе ее можно решить нанесением штриховых кодов и соответствующих контурных отметок на каждую деталь, что позволит роботу распознавать свое местоположение относительно целевого объекта. Этим можно было бы свести всю телевизионную информацию, посылаемую на Землю, к данным об ориентации обслуживаемого объекта. Эталонные изображения объекта можно было бы хранить на дистанционно управляемом космическом корабле, а на поверхность исследуемой роботом планеты посылать лишь «изображения» их несовпадений с реальным объектом. Аналогичная методика разрабатывается для космических аппаратов, ведущих наблюдение за земной поверхностью и передающих изображения районов, где со времени последнего наблюдения произошли какие-то изменения.