Вслед за микрокомпьютерами в учебные заведения и жилища людей начинают приходить миниатюрные роботы. Каковы возможности этих новых, столь разнообразных систем?
При первом знакомстве с микророботом, оснащенным механической рукой, большинство людей сравнивают его с игральным автоматом, в котором призы достаются с помощью миниатюрного подъемного крана. Манипулируя ручками управления, можно перемещать кран вперед-назад или размыкать и замыкать его схват, напоминающий ковш. При определенной сноровке можно захватить со дна витрины автомата горсть леденцов, а затем, к радости юного «оператора», высыпать их на лоток. По внешнему виду такой кран действительно напоминает небольшой робот, т. е. налицо механическое сходство между этими устройствами. Основное различие состоит в том, что ручки управления краном крутят дети, а у робота их поворачивают двигатели, управляемые компьютером.
ЭВМ может направлять и перемещать робот с высокой точностью, снова и снова возвращая его в одно и то же положение; при этом она не испытывает усталости и не делает ошибок. Ребенок же, придя в возбуждение, непременно ошибется и быстро устанет от игры. Однако в иных случаях юный оператор способен оценить создавшуюся ситуацию и повернуть ручку управления краном так, как это ему выгодно, — малогабаритный компьютер не в состоянии это сделать. Здесь человеческий интеллект явно превосходит возможности компьютера, но есть задачи, с которыми компьютер справляется лучше, чем рука и глаз человека, не застрахованные от ошибок.
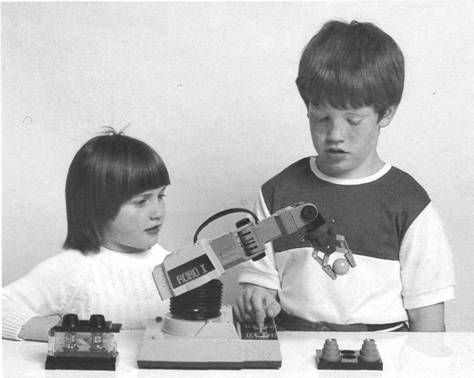
Микророботы могут применяться для учебных целей и развлечений. Робот Арматрон Робо-1 фирмы «Томи» представляет собой весьма сложное, хотя и недорогое, устройство.
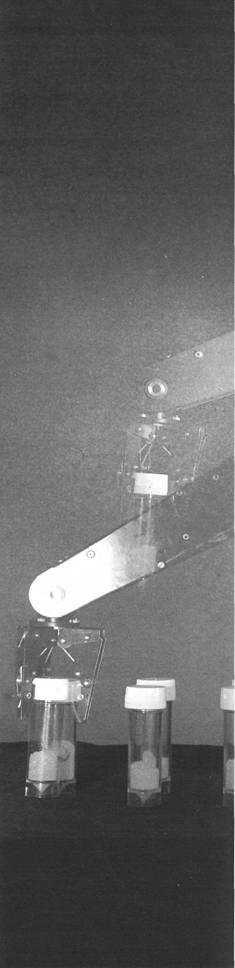
Появится ли вслед за безлюдным предприятием безлюдная лаборатория? Выполнение таких монотонных операций, как взвешивание химических проб, могут взять на себя микророботы, оснащенные манипуляторами.

Привлекая к себе повышенное внимание людей, роботы могут служить целям рекламы. Это творение инженеров японской фирмы «Намко» раздает рекламные проспекты прохожим, для чего используется несложный вакуумный схват, встроенный в его руку.
Совместное применение микроробота и микрокомпьютера навело Джона Билингсли, одного из ведущих специалистов в области робототехники, на мысль, что «робот представляет собой компьютер, наделенный мускулами». Это выразительное определение; однако точнее будет сказать, что робот представляет собой компьютер, оснащенный двигателями, так как именно компьютеризованное управление двигателями составляет основу робототехники. Зубчатые колеса, рычаги и другие механизмы, заставляющие робот действовать, приводятся в движение двигателем, и, следовательно, он является «сердцем» робота. Тот факт, что микрокомпьютер может управлять одним или несколькими двигателями, делает робототехнику более понятной для любителя или учащегося. Но каково же точное определение микроробота?
Люди обычно знакомятся с промышленным роботом, сталкиваясь с ним на производстве, однако определить, что такое микроробот, значительно труднее. Можно выделить три основные разновидности микророботов. Это может быть «робот для забавы», который интересен как новинка или развлечение; подобные устройства демонстрируются на выставках и ярмарках. Это может быть робот, предназначенный для любителей техники и преподавателей; такие изделия часто выпускаются в виде конструкторских наборов. И наконец, существуют устройства, представляющие собой весьма полезный инструмент, предназначенный для использования в лабораториях и даже в промышленности. Данное направление робототехники только зарождается, и нам еще предстоит установить области применения микророботов.
Микророботы появились в 80-х годах как результат широкого распространения микрокомпьютеров. Однако создание роботов началось еще в 60-х годах, когда некоторые фирмы развернули активную деятельность, пытаясь убедить промышленность в том, что роботы могут быть полезны; это во многом напоминало ситуацию конца 50-х годов, когда развернулось производство больших ЭВМ. Как говорилось в главе «Безлюдное предприятие», в 70-х годах роботы хорошо зарекомендовали себя на таких операциях, как окраска распылением и сварка, завоевав всеобщее признание. Тем временем цена на них снижалась, а сами они становились меньше — подобная история произошла с микрокомпьютером. И наконец, появился микроробот, который прошел через многие этапы развития, характерные для микрокомпьютера в 70-х — начале 80-х годов.
Ныне целый ряд фирм выпускает небольшие роботы, для которых создано много управляющих программ; по мере того как изготовители начинают лучше понимать потребности заказчиков, улучшается качество руководств и справочной литературы. На роботов обратили внимание даже средства массовой информации: в Великобритании микророботам посвящены два журнала, по одному журналу выходит в США и во Франции, а пресса и телевидение с упоением рассказывают о роботах. Рынок микророботов постепенно упорядочивается, и вместе с тем вырисовываются их возможности и экономическая целесообразность.
Сегодня робототехника уже не воспринимается как «черная магия». Специалисты теперь гораздо больше знают о недостатках и возможностях роботов; в какой-то степени это относится и к широкой публике. Этому во многом способствовало появление в 80-х годах микроробота как средства обучения и проведения экспериментов. С тех пор микроробот заметно усовершенствовался. В настоящей главе мы рассмотрим современный уровень развития небольших роботов подвижного и стационарного типов, а также попробуем заглянуть в их будущее.