Роботы уже сделали свои первые шаги в космосе, однако планируется еще более широкое применение в космических исследованиях «интеллектуальных» роботов нового поколения.
Вопрос о том, как лучше исследовать космос— посылая туда человека или призвав на помощь робота, — долгое время оставался в центре внимания. Удивительно, что выдвигаемые в этой главе доводы весьма сходны с теми, что приводились относительно использования роботов на производственных предприятиях. Главный аргумент сторонников роботизации заключается в том, что, посылая в космос недорогого (а зачастую и невозвращаемого на Землю) «заместителя» человека, можно добиться значительной экономии средств, тогда как их противники видели преимущества использования человека в его исключительных способностях и мастерстве. В действительности же при освоении космоса всегда предпочтительнее разумное сочетание пилотируемых и непилотируемых исследовательских систем. По существу, сейчас спор ведется только о том, на каком этапе человек должен остановиться и отправить в космос вместо себя механическое подобие.
Лишь считанное число среди запущенных на сегодня космических аппаратов (КА) можно на полном основании считать подходящими под определение роботов, хотя термин «робот» зачастую произвольно использовали, пытаясь таким образом разграничить пилотируемые и непилотируемые КА. На всех спутниках имеются разнообразные автоматические механизмы, но большинство из них практически не способно на большее, чем просто выдвинуть штырь с датчиками или развернуть солнечную батарею.
В обзоре состояния и перспектив космической робототехники, опубликованном в ноябре 1981 г. в журнале Mechanical Engineering, Эвальд Хиер, руководитель программы по автономным системам и космической механике Лаборатории реактивного движения, работающей по контракту с НАСА (Национальное управление по аэронавтике и исследованию космического пространства), сделал следующие прогнозы: «Будущие роботы и манипуляторы для исследования космоса можно разделить на четыре основные категории: 1) исследовательские системы; 2) глобальные обслуживающие комплексы; 3) системы «индустриализации» космоса; 4) транспортные системы... Ясно, что эксплуатация роботизированных КА будет основываться на их способности к автономной работе, в том числе к автоматизированному принятию решений и решению задач при помощи бортовых вычислительных систем. Космический корабль-робот должен быть в состоянии реализовывать сложные программы управления и координировать свои бортовые ресурсы, обеспечивать автоматическое восстановление функциональных узлов и принимать оптимальные решения относительно выполнения поставленных задач.
Дейл Гарднер (слева) и Джозеф Аллен во время полета 51А МТКК «Спейс шаттл» в ноябре 1984 г. снимают с орбиты два псевдоспутника, пользуясь манипулятором (справа), построенным канадскими специалистами.
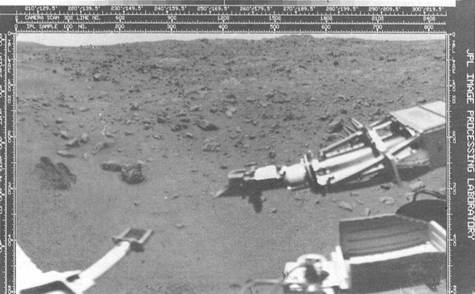
Манипулятор посадочного модуля корабля «Викинг-1» собирает образцы грунта с поверхности Марса после посадки на планету в июле 1976 г.
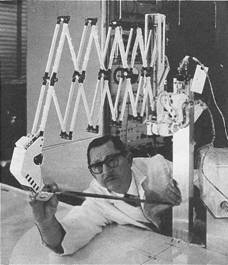
Манипулятор оригинальной конструкции, установленный на лунном модуле КА «Сервейер-3», позволяет копать траншею в лунном грунте на расстоянии до 1 м от посадочного модуля.
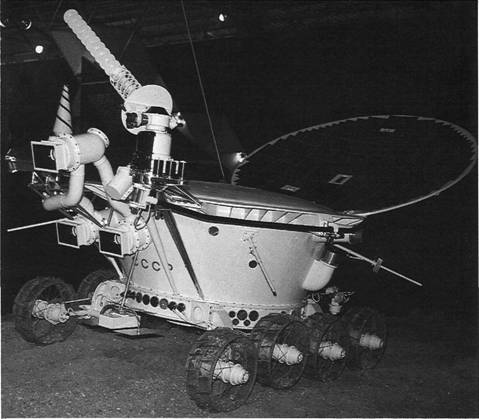
В СССР построено два «Лунохода», которые передвигаются по неровной поверхности Луны по командам с Земли; операторы в центре управления наблюдают лунный пейзаж, полученный с помощью стереоскопической системы из двух телекамер (в центре слева).
Ведущиеся ныне разработки в области искусственного интеллекта показывают, что в перспективе многие функции по обработке данных и сбору информации, которые в настоящее время осуществляются наземной аппаратурой, будут выполняться автономно космическим кораблем-роботом; на Землю же будет поступать лишь нужная пользователям информация. Это означает, что робот сможет самостоятельно решать, какие данные следует сохранять, обрабатывать и отправлять на Землю.
Планы освоения космоса до конца текущего столетия потребуют создания космических роботов и развития методов автоматизации в самых широких масштабах. Именно здесь влияние робототехники и автоматизации будет наиболее существенным».
Исследование, проведенное в 1980 г., показало, что НАСА заметно отстает в области робототехники и телеуправляемых манипуляторов, хотя этой организации отводится ведущее положение в исследовании космоса. В докладе «Машинный интеллект и робототехника: отчет группы анализа НАСА», составленном под руководством Карла Сагана, говорится, что «отставание НАСА от современных достижений в области вычислительной техники достигает 5— 15 лет... Хотя КА «Викинг» (несмотря на определенные недостатки его конструкции) и можно считать блестящим техническим достижением, использование в нем робототехнических устройств и принципов программирования «на месте» ограничилось весьма примитивным уровнем. В будущих полетах должны быть достигнуты значительные сдвиги в этом отношении, однако в уже запланированных полетах по-прежнему предусматриваются традиционные методы сбора данных с ограниченной автоматизацией. Несмотря на новаторские работы НАСА в других сферах науки и техники, в отношении к исследованиям в области вычислительных систем и машинного интеллекта здесь бытовал устаревший, лишенный воображения подход». Авторы доклада рекомендовали НАСА проявить большую решительность и творчество в данной области и провести определенную перестройку самой своей структуры.
Впервые космические роботы вошли в состав посадочных модулей американских автоматических лунных КА серии «Сервейер». Каждый робот был оборудован здесь рукой-пантографом, которой можно было подать команду выкопать траншею в лунном грунте на расстоянии до 90 см от посадочного модуля. Кисть руки могла сгибаться на 112°, а вся рука — поворачиваться так, чтобы ковш (размером 5x13 см) для взятия образца грунта мог перемещаться в пределах от 1 м над поверхностью до 46 см вглубь. Рука-манипулятор позволяла обеспечить зону общей площадью 2,2 м2. При всей ограниченности ее возможностей рука могла выполнять одну, пусть и незначительную, операцию «саморемонта»; так, на «Сервейере-7» рука-манипулятор легким толчком высвобождала прибор для анализа грунта, если он в силу какой-то неисправности не выпадал на поверхность Луны.
Грунтозаборники на советских лунных КА имели манипуляторы, которые фактически принадлежат к классу исполнительных механизмов: они представляли собой траверсы для развертывания бурового инструмента и устройств забора керна с последующим переносом образца в возвращаемую капсулу. Советские специалисты впервые применили телеуправление (дистанционное управление) на лунном автоматическом аппарате «Луноход». Такие аппараты были оснащены стереоскопическими телевизионными камерами для передачи на Землю изображений исследуемой поверхности, на основании которых координировалось движение аппарата по Луне. Именно тогда исследователи впервые столкнулись с проблемами задержки во времени при дистанционном управлении космическими системами (например, прохождение сигнала до Луны и обратно занимает почти три секунды).