Великобритания занимает ведущее место в мире по разработке роботов-манипуляторов. Микроробот-манипулятор представляет собой стационарный робот, с которым можно взаимодействовать как с периферийным устройством компьютера. В США, как будет сказано позже, больше внимания уделяется разработке подвижных роботов. Значение робота-манипулятора в процессе обучения было высоко оценено британскими преподавателями, в результате чего за последние два года для этих целей было закуплено около 7 тыс. подобных устройств.
Разнообразные робототехнические устройства отличаются не только размерами и ценой, но и типом применяемых приводов и механизмов. Есть роботы с гидравлическим приводом, однако чаще в качестве привода используются электродвигатели. Наиболее широко применяются шаговый серводвигатель и двигатель постоянного тока. Двигатели имеют самые различные формы и размеры, а также существенно отличаются друг от друга по грузоподъемности: от нескольких граммов до двух килограммов; цена электродвигателя повышается с ростом его «мускульной силы», хотя у этого правила могут быть исключения. Специализированные роботы обычно более дороги. Примером может служить робот «Суисс микробо», предназначенный для сборки часов. Для выполнения таких операций требуется высокая точность движений, поэтому в названном роботе реализованы сложнейшие дорогостоящие технические решения; в результате его стоимость составляет около 8 тыс. ф. ст., что значительно превышает предполагаемую стоимость микророботов. Как правило, цена робота, поднимающего груз массой до 10 г, составляет 100 ф. ст. и выше, а робот, поднимающий 1—2 кг, стоит около 1000 ф. ст.
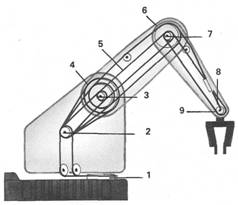
Микроробот «Альфа II» 1 — приводной шкив, установленный на основании; 2— общий приводной вал; 3— плечевая ось; 4 — плечевой приводной шкив; 5— приводные тросы из нержавеющей стали; 6 — локтевой приводной шкив; 7 — локтевая ось; 8 — дифференциальный привод в запястье; 9 — ось запястья.
Робот «Альфа II» — усовершенствованный вариант системы «Альфа» фирмы «Микробот» — перемещается с помощью прецизионной системы тросов, аналогичной той, которая применяется в механизмах для управления самолетом. Робот приводится в действие шестью шаговыми электродвигателями, расположенными в его основании. Крутящий момент передается от двигателей — через систему синхронно действующих ремней, связанных с металлическими шкивами, — на тросы, которые управляют движениями манипулятора. Система оснащена рукой с пятью степенями свободы и схватом, который приводится в действие системой тросов; максимальный радиус действия манипулятора 467 мм, а наибольшая полезная нагрузка 1,36 кг.
Конфигурация, геометрия и другие технические термины, используемые для описания движений подобных устройств, совпадают с аналогичными понятиями, используемыми применительно к промышленным роботам (см. с. 21—28). Единственная конфигурация движений, отсутствующая у микророботов-манипуляторов, — это движение в цилиндрической системе координат. Данный вид движения типичен для промышленных роботов, оснащенных приводными ремнями, но не используется в небольших роботах (во всяком случае, пока). Другой важной характеристикой движения робота является число степеней свободы. Здесь также прослеживается сходство с промышленным роботом. Многие небольшие роботы-манипуляторы, как и человеческая рука, имеют шесть степеней свободы. Плечо имеет две степени свободы: вращение и подъем; локоть — одну; запястье — три: вращение, приведение — отведение и сгибание (вверх-вниз). Эти движения позволяют человеку или роботу выполнять большинство операций. Однако в некоторых случаях нам требуются две руки, и робот «Йес, мен» фирмы «Пэтсентр» имеет две «руки» и две «кисти».
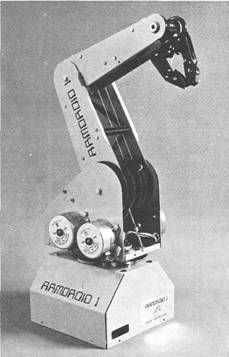
Робот Армдроид 1 фирмы «Колн роботикс» представляет собой манипулятор с контурной системой управления, имеющий пять степеней свободы. Его особенность состоит в наличии трехпалого схвата.
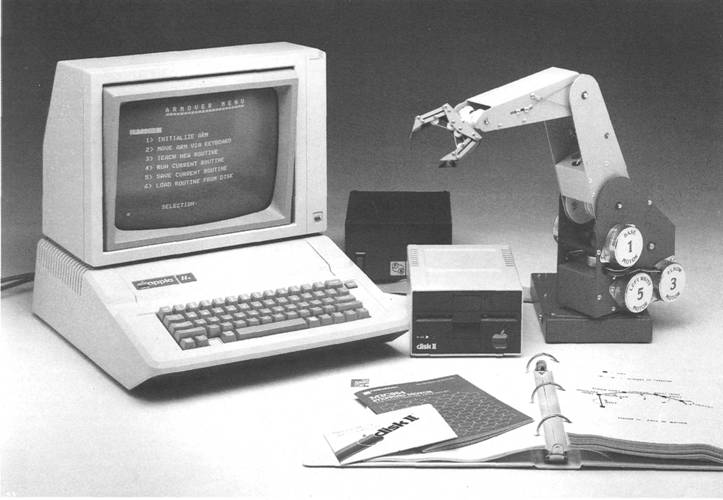
Для моделирования действий промышленных роботов могут применяться микророботы-манипуляторы, например робот Армовер SSA 1040 фирмы «Фидбэк», который в данном случае непосредственно связан с компьютером Эппл II.
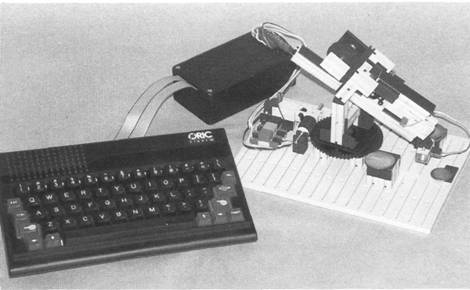
Роботом, собранным из комплекта деталей «Фишертекник», управляет недорогой микрокомпьютер — через интерфейс с аналого-цифровым преобразователем фирмы MRS.
Все движения руки робота, несомненно, важны, но, как и у человеческой руки, ее наиболее ответственной частью является кисть, или схват. Большинство выпускаемых роботов оснащено двухпалым схватом, а робот Армдроид фирмы «Колн роботикс» имеет трехпалый схват. Ни один из микророботов не может менять схваты или инструмент, как некоторые промышленные роботы, однако ряд моделей микророботов поставляется с комплектом инструментов. Так, в манипуляторе робота Райно (носорог) можно закрепить либо пневматический присос, либо двух- или трехпалый схват. В роботе «Смартарм» также предусмотрено несколько способов захвата обрабатываемых деталей и манипулирования ими. Чрезвычайно важно дальнейшее совершенствование схватов для микророботов. Стационарные и подвижные роботы имеют свои области применения и достоинства. Основное преимущество стационарного манипулятора состоит в том, что он закреплен на неподвижном основании и, следовательно, обеспечивает более высокую точность при установке в заданное положение и при многократном выполнении одних и тех же движений; предполагается, что в ближайшем будущем подобное антропоморфное устройство будет демонстрировать большую эффективность, нежели подвижный робот.
Темпы развития небольших роботов-манипуляторов, впервые появившихся в начале 80-х годов, впечатляющи. Среди микророботов, представляющих собой механическую руку, первым поступил в продажу робот «Альфа систем» фирмы «Америкэн микробот». И поныне он остается одним из лучших роботов (среди имеющихся в продаже), что подтвердилось в ходе продолжительных испытаний, проводившихся в 1982 г. британским Управлением по атомной энергии в Харуэлле. С тех пор выпущено немало новых изделий, однако робот фирмы «Америкэн микробот» по-прежнему популярен. Далее появились робот Армдролик с гидравлическим приводом фирмы «Фидбэк» и набор деталей для построения робота с шаговым двигателем фирмы «Колн роботикс»; оба изделия выпускаются с августа 1980 г. В то же время был создан «Смарт арм» — небольшой промышленный обучающий робот. Это изделие вместе с другими устройствами той же фирмы предназначалось для оценки возможностей использования микророботов на производственных линиях; в нем используются серводвигатели постоянного тока. Применение роботов совместно с другим оборудованием, взаимодействие роботов между собой, функционирование роботов на рабочих местах — эти вопросы больше всего интересуют потенциальных потребителей данных изделий.
Движущийся персональный робот Топо фирмы «Андробот» управляется домашним компьютером через ИК-линию связи.

В 1984 г. фирма «Томи» выпустила в продажу ряд технически сложных роботов-игрушек. В их число входят: Омнибот (на заднем плане) — радиоуправляемый электронный «слуга» с встроенным кассетным магнитофоном; Вербот (впереди слева), реагирующий на восемь различных команд, подаваемых голосом; Дингбот, который, натолкнувшись на препятствие, бормочет невнятные «ругательства», после чего продолжает движение.
Еще одно новое изделие такого типа — комплект деталей для сборки робота. «Фишертекник» — самый небольшой, дешевый и обладающий максимальными возможностями набор подобного типа; используя его вместе с интерфейсом фирмы «Майкро роботик системз», можно построить более шести роботов. Возможность построения нескольких роботов — следящего, сортирующего и т. д. — делает такой набор одним из лучших обучающих средств. По мнению фирмы «Майкро роботик системз», создающей коммерческие комплектные специализированные системы на основе небольших роботов, чтобы включить робот в систему для выполнения определенной операции, необходимо вносить некоторые изменения в конструкцию его манипулятора. Специализированный робот, например «Суисс микробо», стоит очень дорого, однако сейчас имеется достаточно много различных механизмов — приводов, электронных блоков и схватов, — из которых можно выбрать узлы, вполне подходящие для построения робота, предназначенного для определенных применений в лаборатории, на заводе, в магазине, в больнице или дома.
В промышленности, похоже, наметилась тенденция отказа от использования больших промышленных роботов, и если изготовителям микророботов удастся изменить бытующее о них представление как о «системах ремней и шкивов», то не исключено, что в ближайшем будущем эти роботы получат широкое распространение в промышленности и торговле.