Предпринимались определенные усилия по созданию органов «обоняния» для роботов. В частности, фирма «Бритиш лейланд» разработала «робот-нюхач», используемый для поиска возможных течей в кузовах выпускаемых автомобилей. Обычно для проверки наличия течей незаконченный кузов поливают снаружи водой, а затем исследуют его изнутри; вместо этого фирма установила на своем заводе в Каули автоматизированное рабочее место, где в проверяемый кузов нагнетается гелий, а манипулятор со смонтированным на нем датчиком перемещается снаружи вдоль сварных швов, которые как раз и представляют собой наиболее вероятные места появления течей.
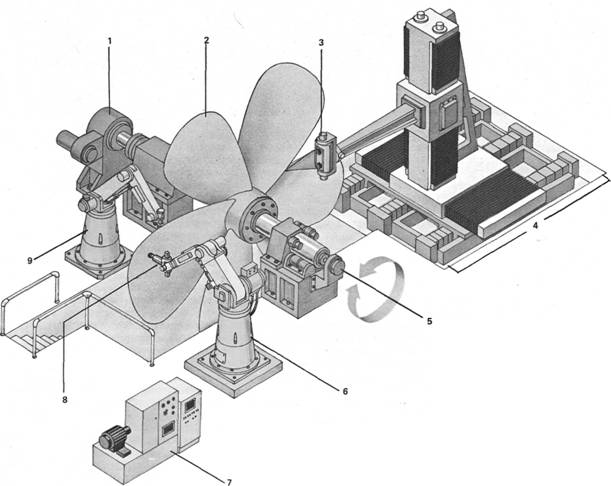
Система APOMS: 1 — редуктор и приводной двигатель вала; 2 — гребной винт; 3 — головка визуального восприятия; 4 — система трехмерных оптических измерений APOMS; 5 — кодовый датчик положения вала; 6 — роботизированная система чистовой обработки гребных винтов с оптическим управлением (PROFS); 7 — гидравлический источник энергии; 8 — инструменты для обработки по копиру и шлифовки; 9 — автоматизированная система сварки гребных винтов (PAWS). Система APOMS, созданная по заказу ВМС США, предназначена для контроля размеров и профиля лопастей гребных винтов военных кораблей. Головка визуального восприятия, изготовленная фирмой «Роботик вижн системз», определяет точное положение элементарного участка на поверхности лопасти; полученная информация передается в процессоры системы APOMS, которые сравнивают реальные координаты участка с эталонными координатами геометрической модели лопасти, записанной в память системы. Затем два робота осуществляют сварку или чистовую обработку лопасти с целью коррекции ее формы. Говорить, что система «видит» лопасть, вряд ли уместно; для анализа металлической поверхности винта используются лазерные головки, с помощью которых определяется расстояние до поверхности лопасти. Системы типа APOMS ни в коей мере не копируют зрительные способности человека — они лишь свидетельствуют о том, что машины могут обладать точностью, быстродействием и надежностью, недостижимыми для человека.
Разумеется, специалисты, разработавшие эту остроумную методику, заслуживают одобрения, однако следует заметить, что при создании самой головки восприятия запахов они вряд ли столкнулись с серьезными трудностями. Настоящие сложности возникают при программировании робота так, чтобы его манипулятор, перемещаясь по замысловатому маршруту, все время мог удерживать индикатор наличия газа на одинаковом расстоянии от швов, а также при организации системы контроля, которая служит для точной локализации обнаруженной течи. Недавно еще одна группа исследователей сообщила о разработке органа «обоняния» для роботов, который способен чувствовать не один специфический «аромат», а различать несколько запахов; это вселяет надежду, что мы еще увидим роботы, обладающие настоящим обонянием. Более того, учитывая, что наш нос отличается исключительно низкой чувствительностью по сравнению с органами обоняния животных, не следует удивляться, если роботы в данном отношении быстро превзойдут людей. Уже сейчас газовые хроматографы позволяют обнаруживать и идентифицировать ничтожно малые количества таких веществ, как наркотики или взрывчатка, причем с гораздо большей точностью, чем таможенник. Подобные «ищейки» уже нашли применение в аэропортах и на некоторых других объектах. Не следует также забывать, что уже немало лет в системах пожарной сигнализации используются такие робототехнические органы обоняния, как детекторы дыма.

Модуль объемного визуального восприятия модели 210 фирмы RVSI в системе «Робота-инспектор» серии 1100, которая служит для контроля деталей самолета. Информация с модуля поступает на отдельный процессор.